O relé representa um tipo de dispositivo eletromecânico que opera como um interruptor. A energização da bobina do relé por meio de corrente contínua
(CC) possibilita a ativação dos contatos, permitindo que sejam alternados entre a posição aberta ou fechada. Um módulo de relé de canal único de 5V
tipicamente incorpora uma bobina juntamente com dois contatos, os quais são identificados como normalmente aberto (NA) e normalmente fechado (NC)
Neste caso vamos usar um rele duplo do kit da robótica para além de permitir uma ligação com mais energia que a do arduino, conseguir também uma
inversão de corrente do motor DC
Para isso vamos conectar VCC do relé no 5v do arduino, GND com GND e In1 e In2 do relé nas portas 8
e 9 do arduino Junto com a montagem da aula anterior
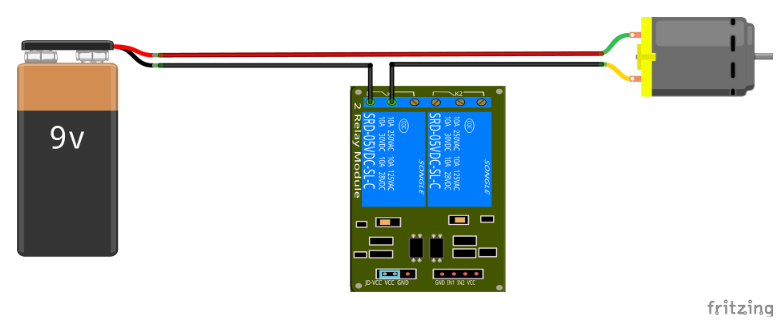
na parte de saida do relé temos 6 saidas da esquerda para direita a 2° e 5° cococamos os negativos e positivo das pilhas, na 1° e 6° negativo e positivo
do motor com um jumper extra cada, estes jumper extra vão ser conectados o negativo na 4° e positivo na 3° desta forma poderemos fazer a inversão de corrente
#include < IRremote.h >
int Pino_receptor = 7;
float armazenavalor;
int motor1f = 8;
int motor1t = 9;
unsigned long tecla_1 = 0xBA45FF00;
unsigned long tecla_2 = 0xB946FF00;
unsigned long tecla_3 = 0xB847FF00;